Trust between humans and robots is improved when the movement between both is harmonised, researchers have discovered. These findings could improve the success of real-world human-robot teams, helping users like the emergency services to work more effectively with robots in the future. By sensing co-movement in real-world environments, robots could use this as an indicator to sense whether the user trusts them sufficiently.
Lead author Dr Edmund Hunt, based in the
University of Bristol’s Faculty of Science and Engineering, said: “People have preferred social distances from others during interaction and their proximity shapes engagement. This is true for human-robot interaction as well. The way a robot moves can also convey information to a user — humans quickly perceive apparent goal-directed behaviour from robot motion. We wanted to understand how humans and mobile robots move together — co-movement through a space such as a building — can affect levels of trust in the robot.”
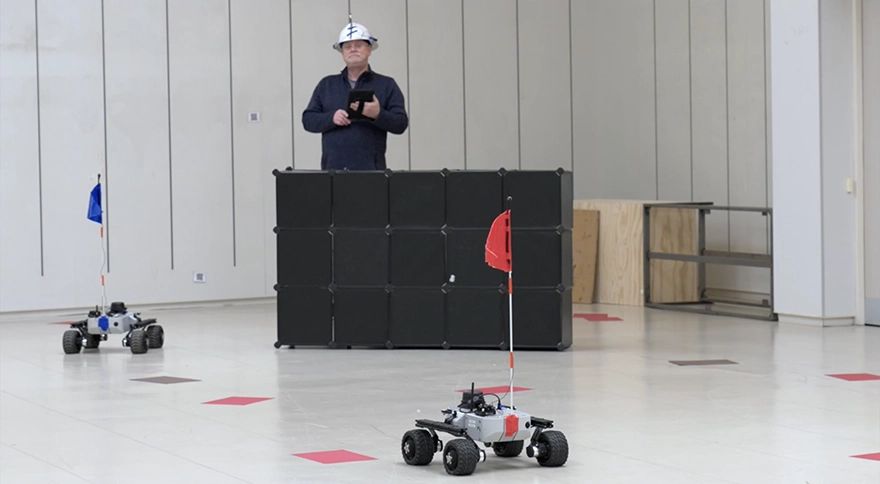
The team predicted that if robots can move alongside humans in a synchronised way it would build trust — and conversely, that if a user distrusts a robot, the co-movement will be disrupted. The experiment took place in Sparks Bristol where members of the public were teamed up with two mobile rover robots and asked them to imagine they were a firefighter searching a building after a fire, using the robots to inspect the building and make sure it was safe.
Statistical evidenceThe team then tracked the human and robot movement using an ultrasound tracking system. They found statistical evidence that synchronisation between human and robot movement over time, when the robot was within 2m, is related to changes in self-reported trust. Users who reported lower trust in the robots were found to have mirrored the robots’ movements less.
This means movement could potentially be used by the robots as a marker for problems with their user’s trust in them, and they could take pre-emptive actions to try and improve or repair the trust, for instance if they have made a mistake and they need to make amends.
Dr Hunt added: “In the future humans and robots will be increasingly working alongside each other in teams — and the teammates will need to trust each other. We found evidence that when humans and robots can move together in a more synchronised way it helps trust — and that when trust is damaged, this co-movement is disrupted too. This might provide an early warning of the need for trust repair — so that a human-robot mission can still be successful when things do not go to plan.”
Now the team plan to investigate further the causal relationship from decreased trust to decreased co-movement. This includes establishing whether an interruption to robot co-working is more difficult for the participant to find the rhythm of co-moving with the robot, which may not be a trust issue as such. It might also include exploring other forms of minimal, nonverbal communication suited to non-humanoid robots, such as indicator lights or sounds, which can shape how trust is developed and maintained.